Závěrečná práce: Henrieta Micheľová, učo 456149: Distribuované algoritmy pro rekonfiguraci platformy RoFI
Bakalářská práce
Distribuované algoritmy pro rekonfiguraci platformy RoFI
Distributed Planning for the RoFI Platform
Anotace
Platforma RoFI je nová modulárna robotická platforma vyvíjaná v laboratóriu ParaDiSe. Táto práca stavia na už definovaných konceptoch platformy a prináša nový pohľad na rekonfiguráciu modulárnych robotov tejto platformy. Ďalej navrhuje a implementuje riešenie problému rekonfigurácie robotov z distribuovaného hľadiska, teda z pohľadu jedného modulu. Prínosom tejto práce je nástroj rofi-distribute, ktorý …více
Abstract
The RoFI platform is a brand new modular robotic platform developed in the ParaDiSe laboratory. This thesis builds on already defined platform concepts and brings new perspective on the reconfiguration of this platform's modular robots. Furthermore, it designs and implements a solution to the problem of reconfiguring robots from a distributed point of view, i.e. from a single module perspective. The …více
Klíčová slova
modulárny robot RoFIbot distribuovaný algoritmus rekonfigurácia platforma RoFI MPI OpenMPIZadání práce
28. 5. 2019 09:41, prof. RNDr. Ivana Černá, CSc., učo 1419
- Zadáno/změněno 28. 6. 2019 07:01, Eva Drštková
- Záznam založen 2. 5. 2019 13:39, Jana Zemanová, učo 9619
- Zveřejnit od 27. 5. 2019 11:16, Alena Dvořáková
- Práce převzata 27. 5. 2019 11:16, Alena Dvořáková
 slovenština
slovenština
Literatura
- GHALLAB, Malik; Dana S. NAU a Paolo TRAVERSO. Automated planning and acting. Cambridge: Cambridge University Press, 2016, xvii, 354. ISBN 9781107037274.
Práce na příbuzné téma
Seznam prací, které mají shodná klíčová slova.
-
Paralelní implementace algoritmu dekomprese silového pole
Mgr. David Němeček, učo 324872 -
PVM rozhraní pro DiVinE
Mgr. Daniel Gajdoš, učo 72582 -
Tvorba Federica Díaze v letech 2009-2017 z hlediska tematických okruhů
Mgr. Pavla Zámečníková -
Kyborgizace lidského těla z hlediska fenomenologického. Případová studie prelingválně a postlingválně neslyšících po implantaci kochleárního implantátu
Mgr. Antonín Maxmilián Pantl -
Vliv automatizace na pracovní aktivity zaměstnanců vybrané brněnské organizace
Mgr. Iva Prášková -
Semisynchronní transkoding multimediálních dat
Ing. Mgr. Roman Vaníček -
Ukazatele chudoby
Mgr. Denisa Spoustová -
Člověk - stroj - umělá bytost
Mgr. Sabina Kubová Lašanová, učo 105132
Složky
Soubory
-
Přidání souboru
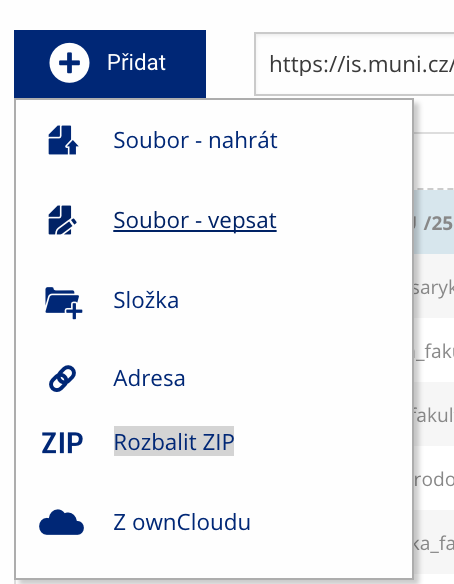 Soubor nebo složku lze nahrát pomocí tlačítka Přidat.
Soubor nebo složku lze nahrát pomocí tlačítka Přidat. -
Další operace se soubory
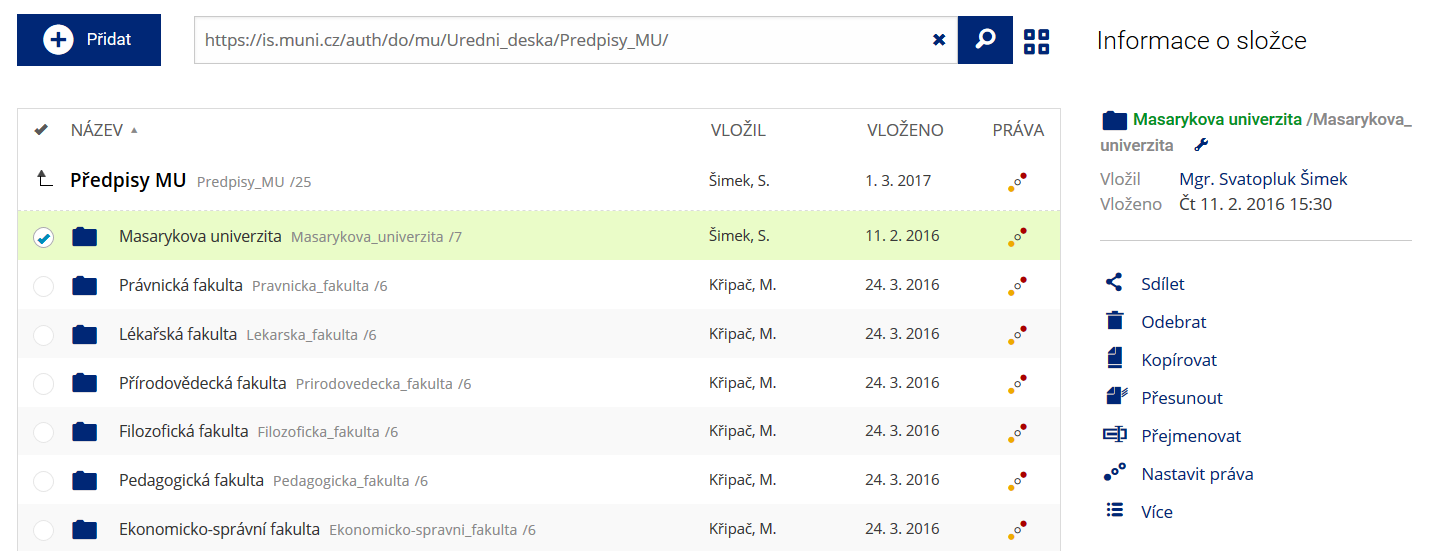 Podrobnosti lze zjistit označením příslušného řádku.
Podrobnosti lze zjistit označením příslušného řádku. -
Pohled pro experty
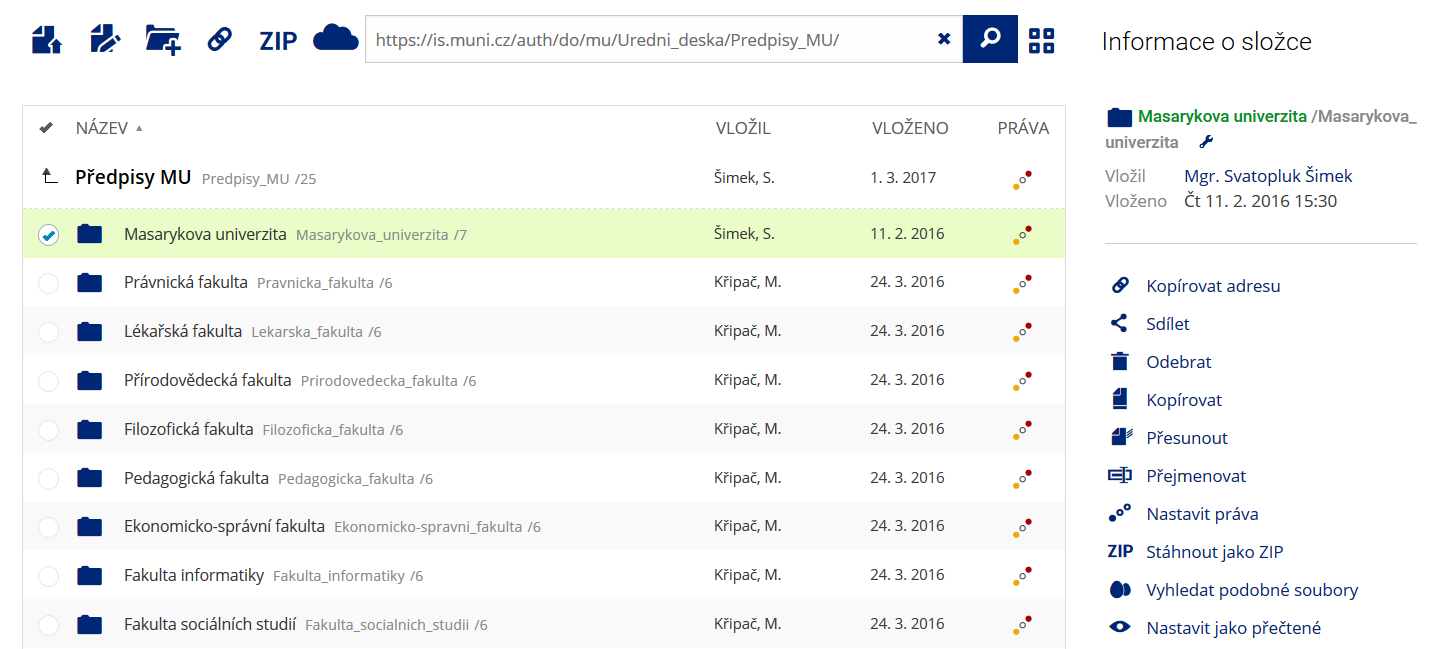 Pro častou práci je možné zvolit režim Více možností.
Pro častou práci je možné zvolit režim Více možností. -
Vyhledávání souborů
 Vyhledávaný výraz můžete zadat přímo do adresního řádku.
Vyhledávaný výraz můžete zadat přímo do adresního řádku. -
Rychlý přístup k souborům
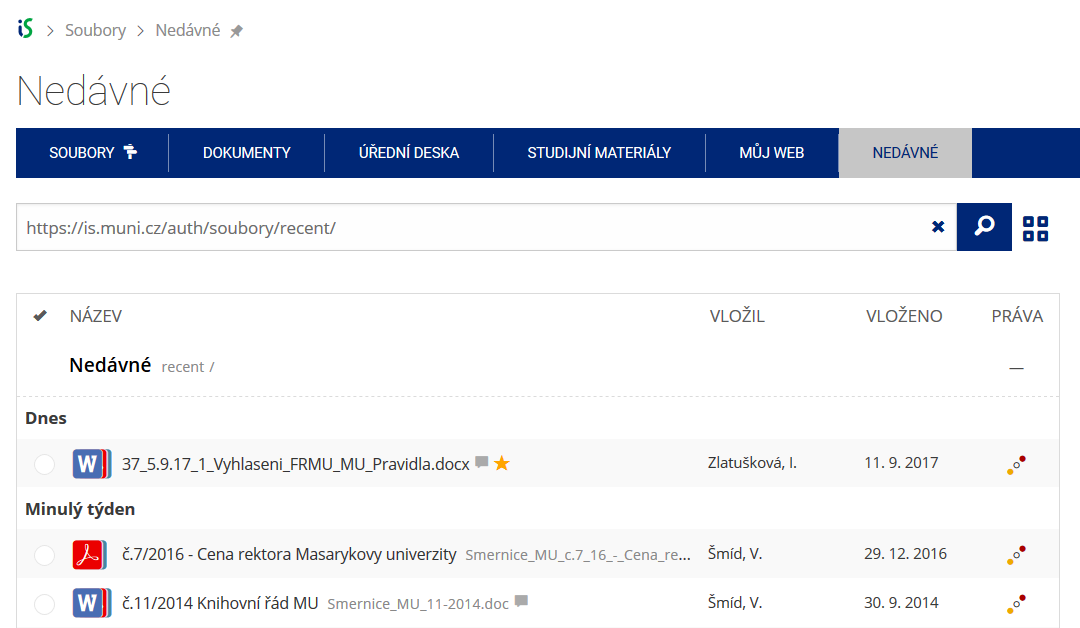 Pomocí funkce Nedávné je možné se rychle vrátit k právě prohlíženým souborům. Oblíbené soubory je také možné označit Hvězdičkou.
Pomocí funkce Nedávné je možné se rychle vrátit k právě prohlíženým souborům. Oblíbené soubory je také možné označit Hvězdičkou.