Příklady nelineárních jevů (fold, transkritická a vidličková bifurkace)
Co se naučíme:
pochopit nelineární jevy v dynamických systémech související s uvedenými bifurkacemi
použít znalostí o bifurkacích souvisejících s přechodem vlastního čísla přes 0 na praktických úlohách
popsat bifurkaci SNIPER a jev synchronizace
Jednoparametrická bifurkace spojitého systému spojená s přechodem reálného vlastního čísla přes 0 je typicky příčinou jednak změny stability rovnováhy, ale hlavně změny počtu rovnováh.
fold bifurkace je typicky příčinou skokové změny v dynamice systému, kdy ustálený stav (stabilní rovnováha) při malé změně parametru pod kritickou hodnotu zanikne a systém reaguje velkou změnou stavových hodnot
transkritická bifurkace je typicky příčinou změny v dynamice systému, která sice skoková není, ale vede k odlišné závislosti výstupu systému na parametrech, což může znamenat např. dichotomii v měřených datech apod.
vidličková bifurkace je generická v symetrických systémech, kde hraje stejnou roli, jako transkritická, kromě toho je příčinou vzniku větvení
Biochemický přepínač
Vzorovým příkladem skokové změny zapříčiněné fold bifurkací je biochemický přepínač.
Modelová (velmi zjednodušená) rovnice produkce genetického proteinu v buňce:
Protein vzniká autokatalytickou reakcí, která zde není popsána, ale můžete se podívat na Hillovu rovnici. Jde o popis kinetiky o něco složitější reakce, než je enzymatická kinetika Michaelise–Mentenové.
Zavedeme novou proměnnou a označíme . Pak:
Rovnováha splňuje
Jedna rovnováha je tedy nulová a druhá splňuje
můžeme tedy větve rovnováh nakreslit.
Zajímají nás pouze kladné hodnoty koncentrace i parametru jako poměru rychlostí reakcí.
Se znalostmi z předchozí kapitoly můžeme ukázat (ukažte!), že je bod transkritické bifurkace (bod větvení) a bod je limitní bod (kritická hodnota fold bifurkace).
Překročí-li tedy kritickou hodnotu , gen se přestane produkovat.
Vymírání populací
Dalším vzorovým příkladem skokové změny zapříčiněné fold bifurkací je vymírání populací.
Používané rovnice pro modelování velikosti (hustoty) populace jsme si již uvedli a dokonce jsme si ukázali příklad vymíraní na modelu s Alleeho efektem:
Domácí úkol
Použijte teorii bifurkací k analýze modelu lovu v populaci s Alleeho efektem:
Návod: fold bifurkace nastává pro a splňující: a .
Model výlovu
Model výlovu s logistickým růstem:
Uvažujme konstantně lovenou populaci (např. tuňáků) modelovanou
logistickou rovnicí
s mírou růstu , výlovem a kapacitou prostředí .
Výlov je parametrem, který ovlivňuje existenci rovnovážného stavu
Bifurkace typu fold nastává v případě, že pro rovnovážný bod v kritické hodnotě parametru platí
tj. pokud platí což je právě splynutí
rovnováh a v jedinou.
To nastává pro kritickou hodnotu parametru :
Protože a , jsou
splněny podmínky nedegenerovanosti a transverzality bifurkace typu
fold.
Pokud výlov překročí tuto prahovou hodnotu , populace nutně vymře.
Model excitace neuronu
Nejjednodušší model toku Na do neuronu přes buněčnou membránu je rovnice
kde je normalizované membránové napětí (potenciál) excitabilní buňky, ovlivňuje rychlost odpovědi a je práh mezi elektrickým klidem a vzruchem. Parametr je elektrický proud, který prochází membránou - vnější buzení.
Větev rovnováh má vždy dva limitní body. Viz neuron.mw.
Rovnováhy pak můžeme nakreslit v závislosti na parametru podle vztahu . Dva limitní body i stabilita jsou v tomto modelu „vidět“. Fold bifurkace pak vysvětluje jev, kdy excitabilita neuronu je skoková změna napětí způsobená překročením hraničního prahu vstupního proudu. Do tohoto prahu neuron neodpovídá.
Model zániku korálových útesů
Přestože to není typické, i transkritická bifurkace může být příčinou skokové změny. Uveďme zde model zániku korálových útesů.
Tento model si ukážeme na cvičení.
Konvekční proudění
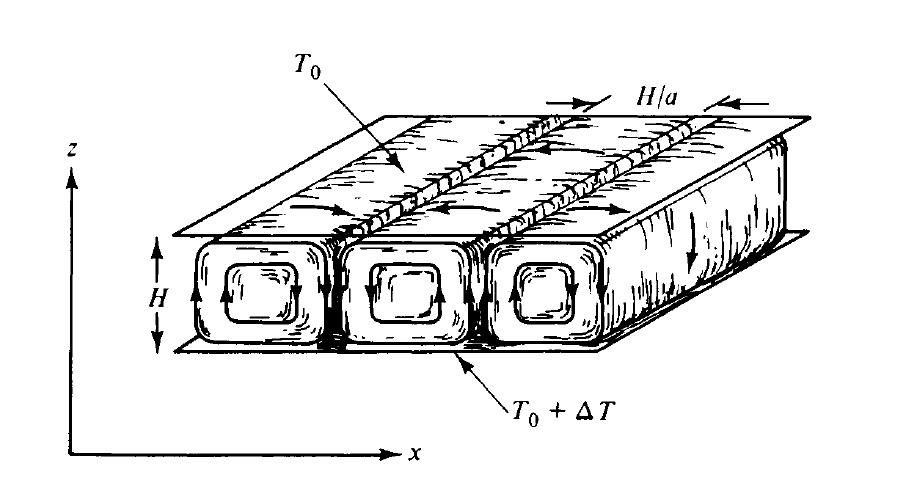
Jako příklad vidličkové bifurkace si ukážeme slavný Lorenzův model. Nebudeme se ale zabývat oblastí, kde vzniká Lorenzův chaotický atraktor, ale oblastí, kde dochází k zániku jediné stabilní rovnováhy, která odpovídá stacionárnímu rozložení teplot mezi teplejší zemí a studenější horní vrstvou atmosféry a vzniku konvekčního proudění.
Lorenzův model
Rovnice popisující proudění vznikající vedením tepla si uvádět nebudeme (jde o parciální diferenciální rovnice). Anglický fyzik John William Strutt, 3. baron Rayleigh ukázal, že pokud
vznikají periodická řešení těchto PDR. Číslo se proto nazývá Rayleigho číslo, kde je gravitační zrychlení, tepelná roztažnost, viskozita a tepelná vodivost kapaliny.
Jak se zvyšuje rozdíl teplot povrchů , vedení tepla se stává nestabilní a vzniká cirkulace kapaliny. Můžete ho sledovat v hrnku horké kávy jako tmavé skvrny....
Zjednodušený model pohybu atmosféry uveřejnil v roce 1963 Edward Lorenz. Model potvrzuje nejen Rayleigho výsledky, ale ukazuje vznik turbulencí.
: rychlost rotace konvekčního proudění
: rozdíl teplot spodní a horní vrstvy
: odchylka teploty od její střední hodnoty
a parametry jsou
: Prandtlovo číslo (kinematická viskozita/součinitel tepl. vodivosti),
Ukažte, že pro má systém jedinou stabilní rovnováhu, která fyzikálně odpovídá systému bez proudění (vyrovnání teplot) a je bod symetrického větvení. V MATCONTu ověřte, že jde o bod vidličkové bifurkace.
Pro při přechodu přes (zvýšením rozdílu teplot horního a dolního povrchu ) dochází v systému
k vzniku dvou stabilních stavů z nulového stavu . Ten odpovídá nulové rychlosti rotace konvekčního proudění, teplota je stacionárně rozložena mezi spodní a horní vrstvou (viz stacionární řešení rovnice vedení tepla pro Dirichletovu okrajovou podmínku v předmětu profesora Pospíšila
PřF:M6868 Spojité deterministické modely II). Nově vzniklé stabilní stavy odpovídají konvekčnímu proudění o rotaci proti směru a ve směru hodinových ručiček. Vznikají tedy konvekční proudění oběma směry o stejné rychlosti.
Bifurkace SNIPER a synchronizace
Poslední významnou aplikací fold bifurkace je Saddle-Node Infinite PERiod bifurkace – SNIPER.
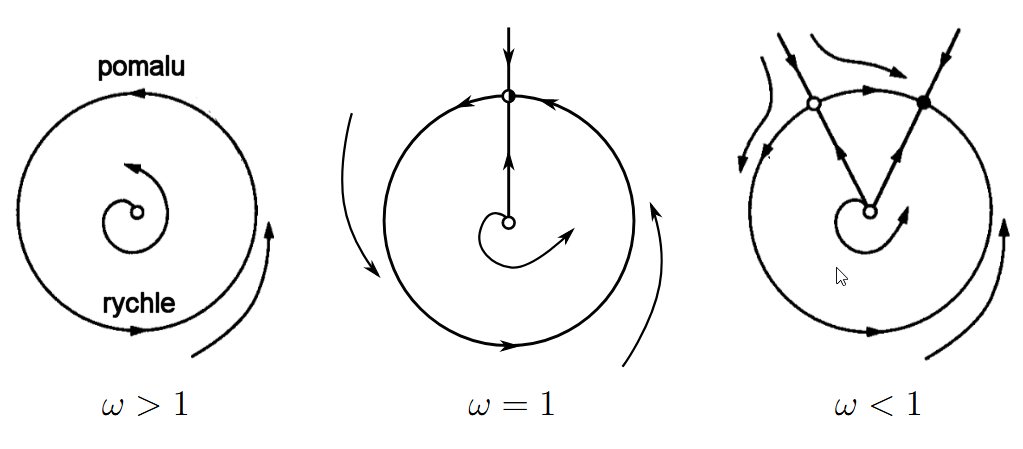
Uvažujme spojitý systém popsaný v polárních souřadnicích systémem
Má rovnovážný bod , , který je nestabilní. Pro může existovat rovnováha odpovídající cyklu, která zaniká fold bifurkací pro kritickou hodnotu .
Kritický bod této bifurkace pak dává vzniknout cyklu s nekonečně dlouhou periodou, odtud její název. Fázový portrét vypadá takto:
Tento typ bifurkace stojí za jevem, kterému říkáme synchronizace.
Představte si dva běžce na oválu (nebo taky oscilující neurony, rotující vesmírná tělesa, děti na houpačce, hodiny na stěně nebo metronomy na společné základně). Každý má svou úhlovou rychlost a a jeho pozice na oválu (fáze) je dána rovnicí
Neznají se, nekomunikují spolu. Běží (oscilují) svou vlastní frekvencí.
Pokud se ale běžci znají a chtějí spolu komunikovat, upraví svůj běh (oscilaci, rotaci, houpání nebo kývání). Čím blíž k sobě budou, tím víc se budou snažit. Sílu spřažení označme .
Stavová proměnná popisující úhlovou vzdálenost mezi běžci (oscilátory) má rovnici
kde
Proto vznikne vazba. Pokud bude dost silná, vznikne stabilní vázaná rotace – synchronizace. Proto se díváme stále na stejnou přivrácenou stranu Měsíce a máme štěstí, že vázaná rotace nevznikla mezi Sluncem a Zemí, protože jsme dostatečně daleko.
Úkol
Vyzkoušejte si synchronizaci na metronomech.
V reálu i v Maplu.