31. Stabilometrie
31.1 Poznámky ke cvičení
Posturální rovnováha
Pojem „posturální rovnováha“ je definován jako schopnost udržovat a ovládat těžiště těla tak, aby se zabránilo ztrátě rovnováhy jak ve statických, tak dynamických pozicích. Rovnováha je statický pohyb, který je zajišťován tonicitou svalů (hlavně extenzorů).
Existují dvě složky, které zajišťují tonus posturálních svalů: svalová a nervová. Svalová složka je dána mechanickými vlastnostmi svalových vláken, tj. jejich pružností nebo napětím. Nervová složka je spojena s aktivitou nervového systému díky implementaci nepodmíněného reflexu způsobeného svalovým napětím („reflexní tonus“).
Na regulaci svalové posturální aktivity se podílejí různé úrovně centrálního nervového systému (CNS): spinální (míšní, úroveň motoneuronů), subkortikální (řízení podpůrné a účelové motoriky) a kortikální (řízení ideokinetické motoriky), které zpracovávají informace ze senzorických systémů různé modality: proprioceptivních, vestibulárních, vizuálních nebo taktilních. Vznikají kortikální a subkortikální motorické reakce, jejichž cílem je aktivace axiálních svalů a svalů končetin, zejména dolních, což umožňuje pomocí koordinovaných pohybů udržovat posturální rovnováhu. Pro regulaci vertikální polohy těla je nejdůležitější z výše uvedených systémů proprioceptivní.
Díky propriocepci vnímáme polohu končetin, jejich pohyb i stupeň jejich svalového tonu. Proprioceptory se nacházejí ve svalech, šlachách, fasciích, kloubních pouzdrech a v kůži (Tabulka 31-1).
Tabulka 31-1 Proprioreceptory
| Receptor | Lokalizace | Podnět a odpověď |
| Svalová vřeténka, stretch receptory | nachází se ve svalech | Receptory registrují změnu délky svalů, umožňují naplánovat, kdy a jak daleko natáhnout nohy při chůzi nebo ruce pro dosažení předmětu. |
| šlachové (Golgiho) tělísko | nachází se ve šlachách | Receptory registrují změny svalového napětí. Cítí, jaké napětí vyvíjí sval a co je potřeba k provedení pohybu. |
Vestibulární aparát
Vnitřní ucho je místo, kde je uložen sluchový a vestibulární aparát. Základním nástrojem vnímání zvuku, pohybu i polohy je mechanoreceptorová vlásková buňka. Tyto buňky jsou umístěny uvnitř vnitřního ucha v různých oddílech a jsou specializované na různé úkony (jedny vnímají pohyb, další zrychlení a některé zvuk). (Obrázek 31-1).
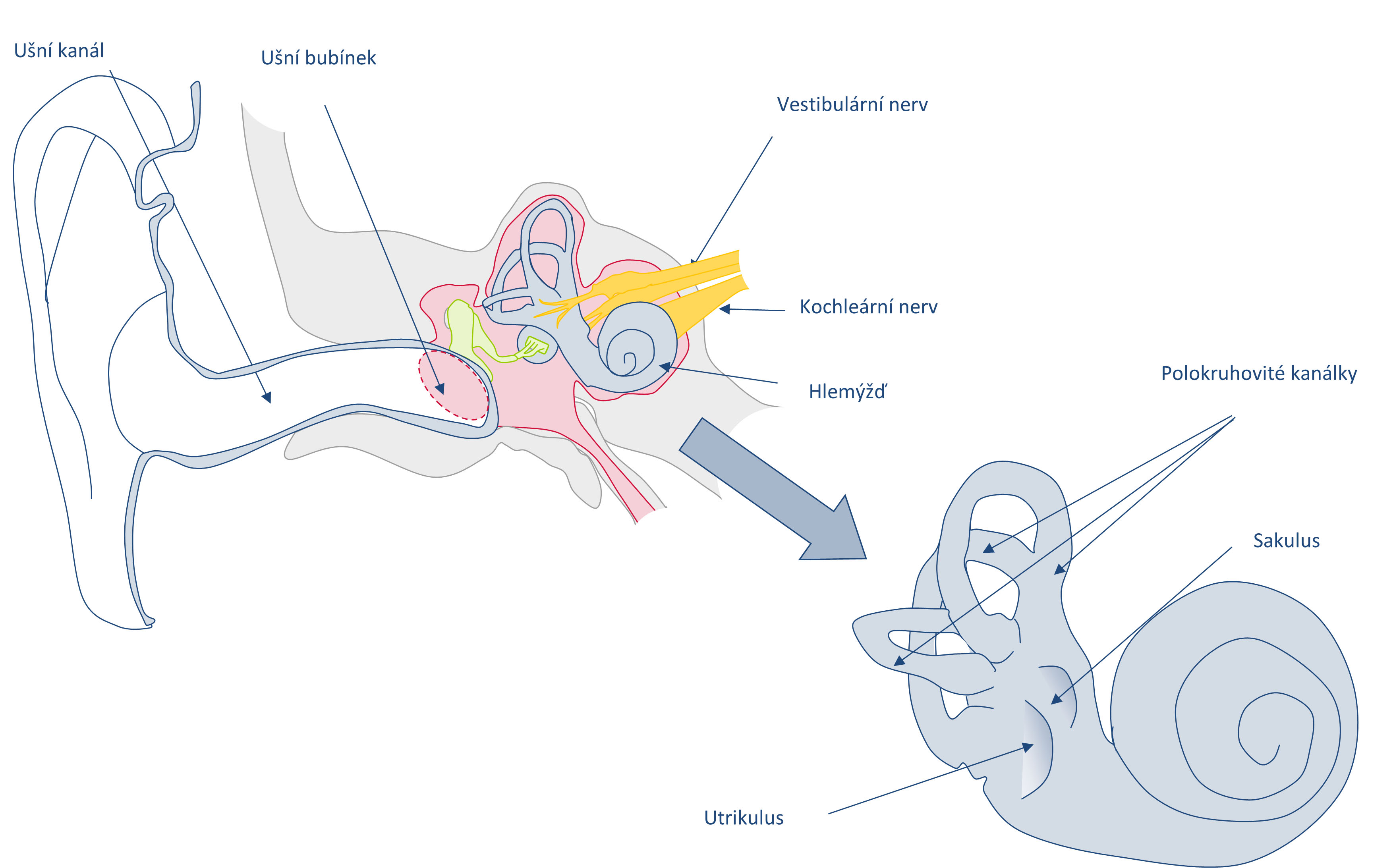
Komentář: Vestibulární aparát je smyslový orgán, dominuje při zajištění rovnováhy hlavy a těla v prostoru (v součinnosti s ústrojím zrakovým a proprioceptivním). Základními orgány pro vnímání polohy a pohybu hlavy v prostoru jsou polokruhovité kanálky, utrikulus a sakulus.
Pozice hlavy je snímána utrikulem a sakulem (liší se typem vnímaného zrychlení), zatímco pohyb hlavy je snímán polokruhovými kanálky. Nervové signály generované ve vestibulárním gangliu jsou přenášeny vestibulárním nervem do mozkového kmene a mozečku.
Utrikulus a sakulus jsou z velké části složeny z makulární tkáně (množné číslo = maculae). Makula se skládá z vláskových buněk obklopených podpůrnými buňkami.
Pohyb vlásků je při pohybu hlavy interpretován mozkem a udává tak jednu z informací pro udržení stability (Obrázek 31-2).
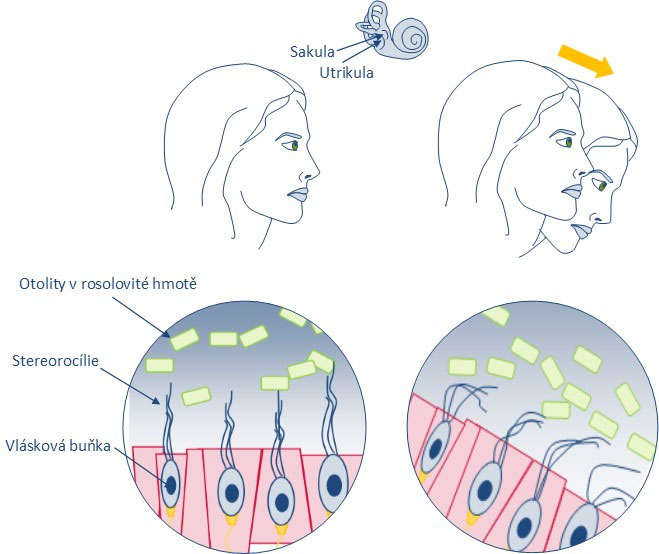
Komentář: Stereocílie vláskových buněk sahá do viskózního gelu nazývaného otolitická membrána. Na vrcholu otolitické membrány je vrstva krystalů uhličitanu vápenatého – tzv. otolity. Otolity v podstatě způsobují, že otolitická membrána je poměrně těžká. Otolitická membrána se pohybuje samostatně od makuly v reakci na pohyby hlavy. Naklonění hlavy způsobí, že otolitická membrána sklouzne přes makulu ve směru gravitace. Tímto se ohýbají stereocílie, což způsobuje depolarizaci nebo hyperpolarizaci vláskových buněk.
Polokruhovité kanály jsou tři prstencová rozšíření vestibulu. Jsou orientovány v rovinách horizontální, vertikální a laterální. Základna každého polokruhového kanálu, kde se setkává s vestibulem, se spojuje s rozšířenou oblastí známou jako ampula. Porovnáním relativních pohybů jednotlivých ampulí potom může vestibulární systém detekovat směr většiny pohybů hlavy v trojrozměrném (3D) prostoru (Obrázek 31-3).
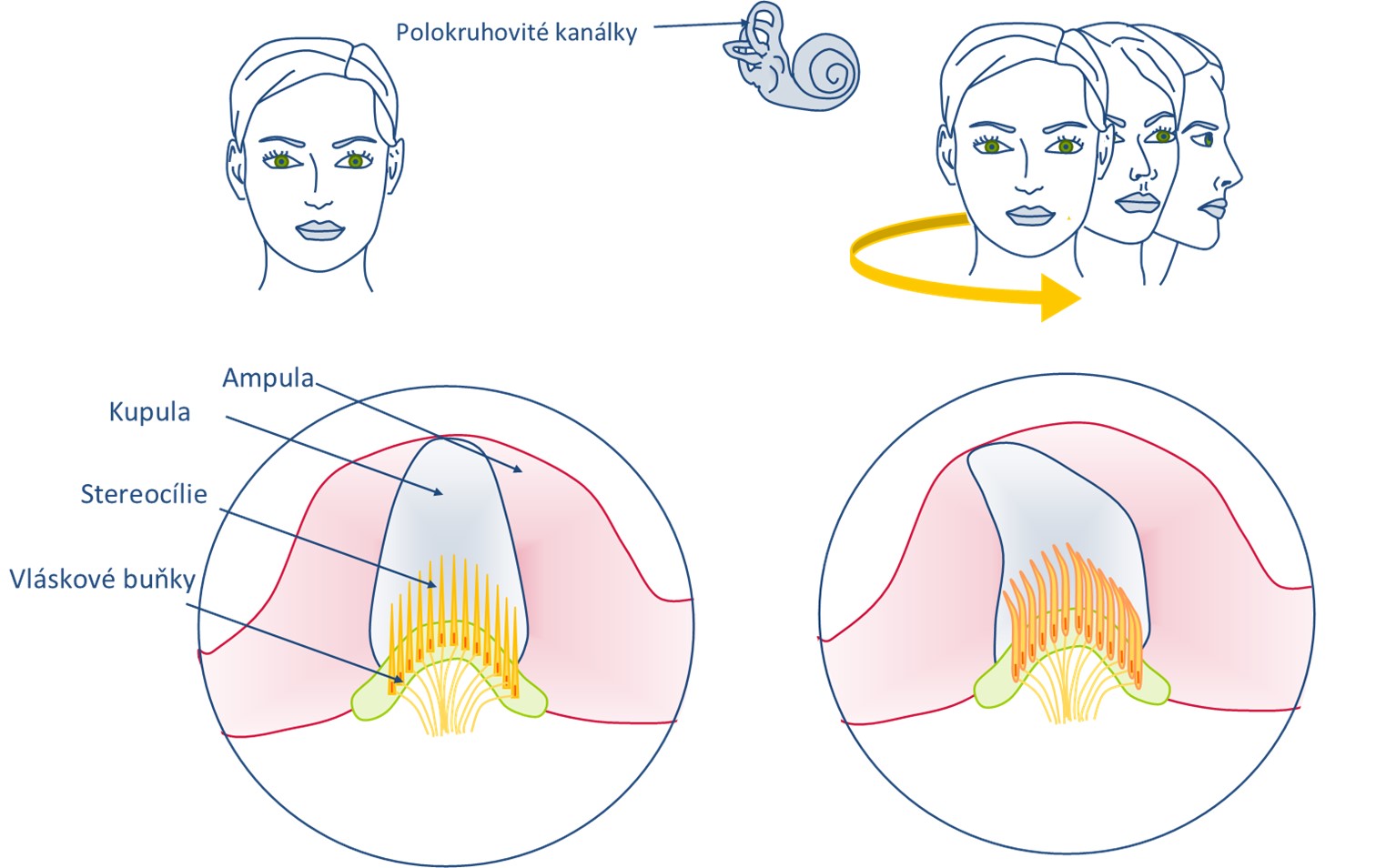
Komentář: Ampula obsahuje vláskové buňky, které reagují na rotační pohyb, jako je otáčení hlavy a vyslovení „ne“. Stereocílie těchto vláskových buněk sahá do kupuly, což je membrána, která se váže na horní část ampuly. Jak se hlava otáčí v rovině rovnoběžné s polokruhovým kanálem, tekutina zpožďuje a vychýlí kupuly ve směru opačném k pohybu hlavy. Polokruhové kanály obsahují několik ampul, některé jsou orientovány horizontálně a jiné vertikálně.
Vestibulospinální reakce
Veškeré informace z vestibulárního aparátu jsou přenášeny vestibulárním nervem do prodloužené míchy a odtud do mnoha částí CNS (mozečku, jader okohybného nervu, mozkové kůry, retikulární formace a autonomních ganglií). Neurony vestibulárních jader mají schopnost reagovat na změny polohy končetin, otáčení těla a hlavy, signály z vnitřních orgánů. Navíc zajišťují kontrolu a řízení různých motorických, popřípadě autonomních reakcí. Nejdůležitější z těchto reakcí jsou vestibulospinální (dynamická redistribuce napětí kosterního svalstva a reflexní reakce nezbytná k udržení rovnováhy), vestibulovegetativní (reakce kardiovaskulárního, gastrointestinálního systému – například mořská nemoc) a vestibulookulomotorické (nystagmus).
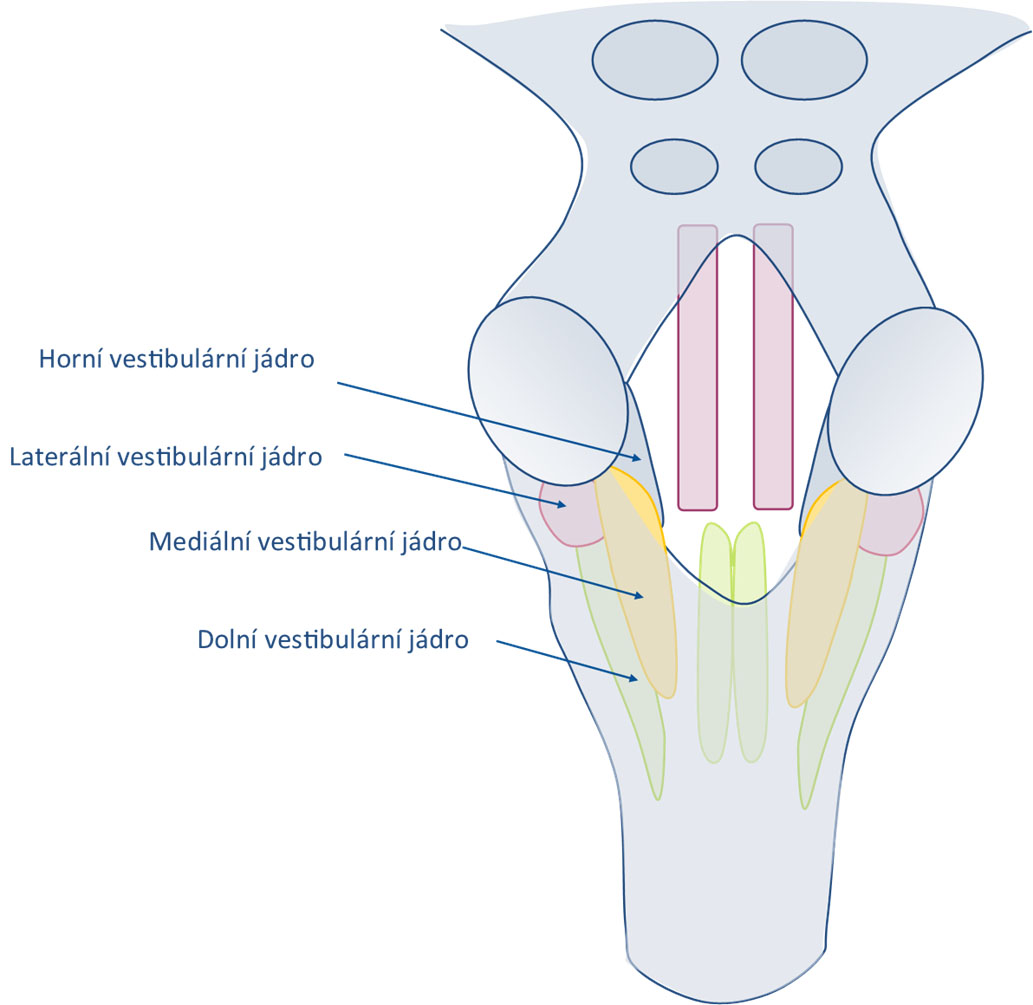
Mediální vestibulospinální trakt vychází z mediálního vestibulárního jádra. Směřuje předními míšními kořeny do krční a středně hrudní úrovně a končí na interneuronech mediální skupiny páteřní míchy.
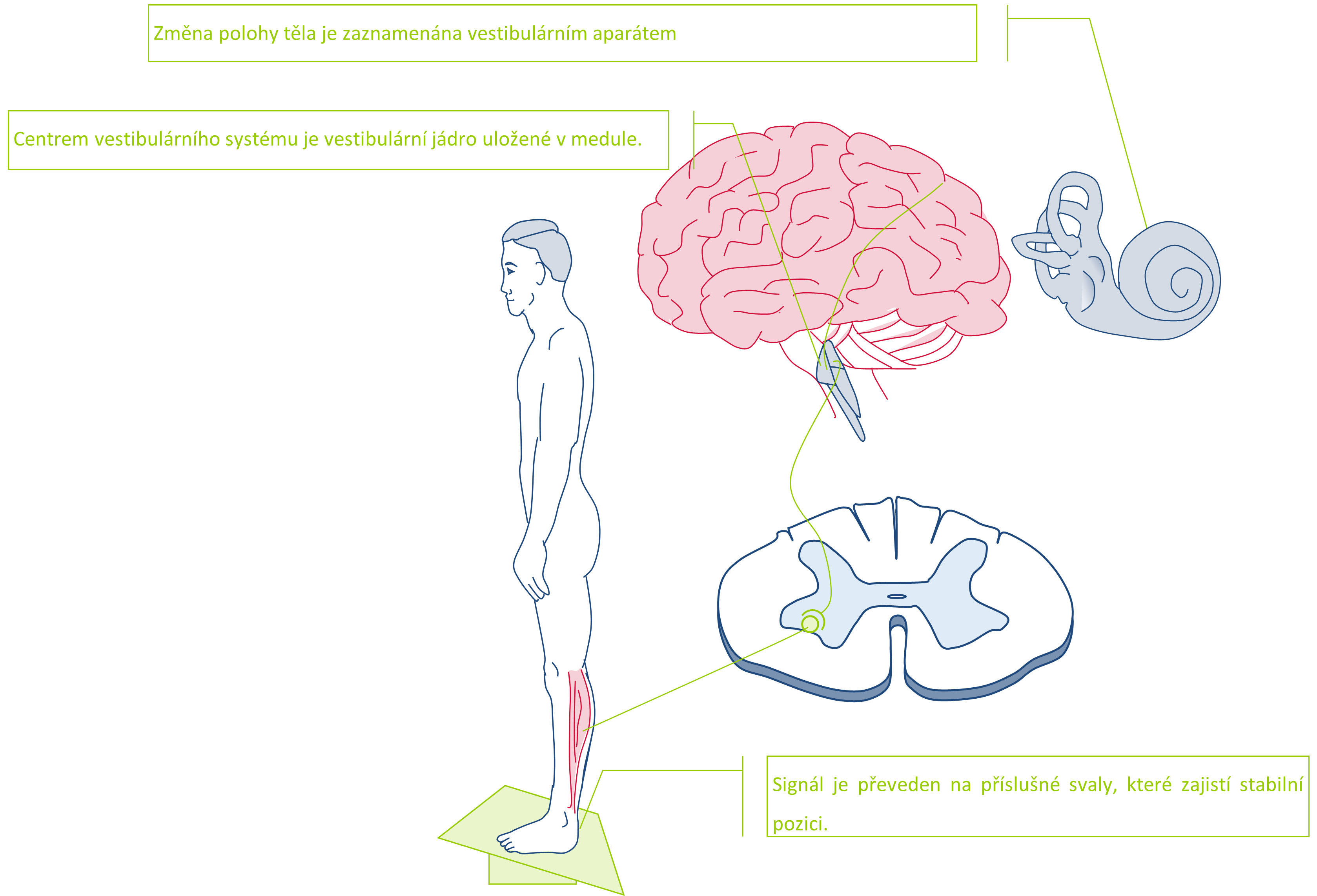
Mediální vestibulární jádro přijímá smyslový vstup z labyrintů vnitřního ucha, hlavně z polokruhovitých kanálků. Tato cesta tedy reguluje polohu hlavy, když je vystavena úhlovým zrychlením.
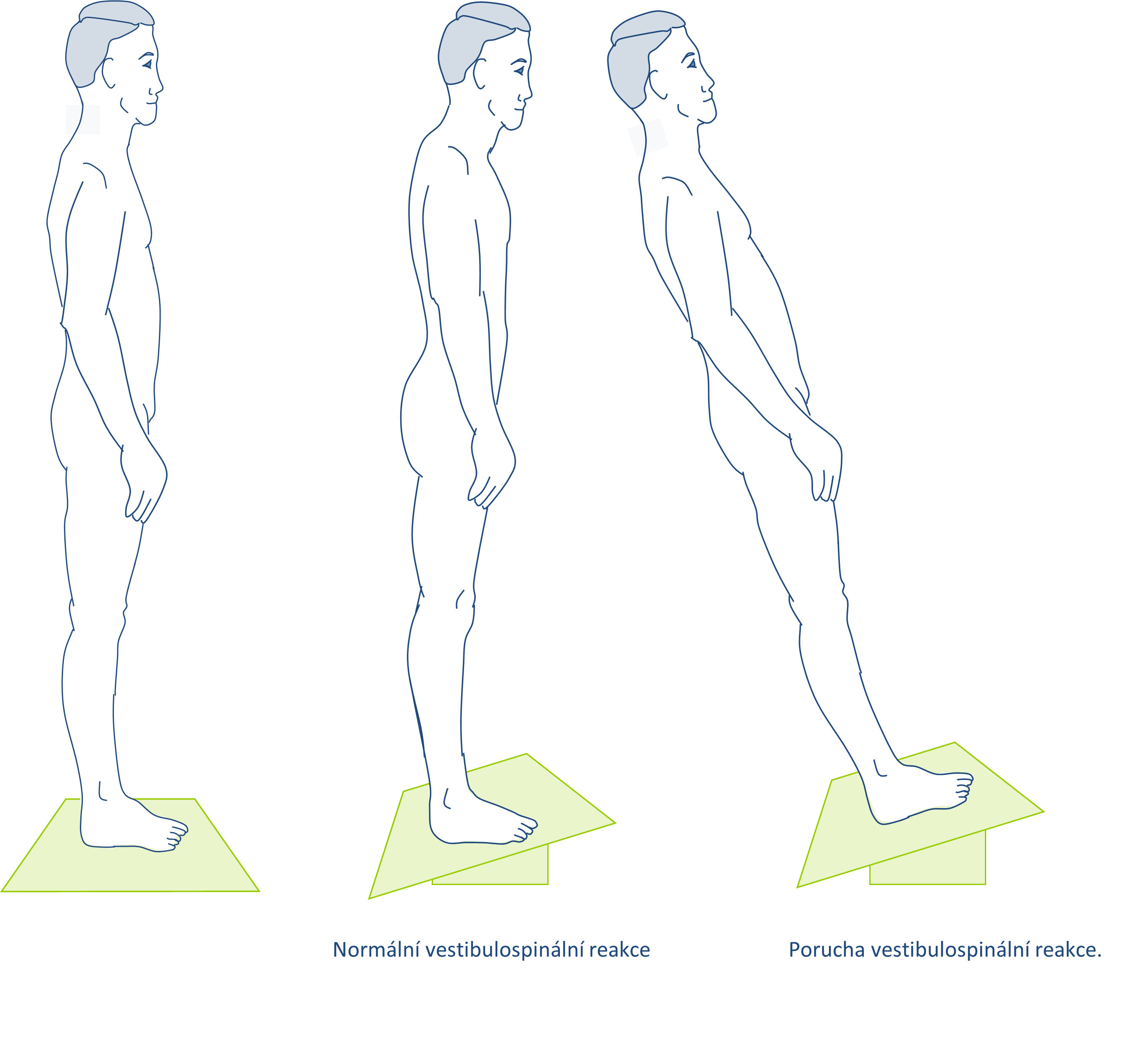
Laterální vestibulospinální trakt vede excitační signály do interneuronů, které přenášejí signál na motorické neurony v antigravitačních svalech. Tyto antigravitační svaly jsou extenzorové svaly nohou, které pomáhají udržovat vzpřímené držení a rovnováhu těla (viz Obrázek 31-5).
Vestibulovegetativní reakce
Mozková kůra se aktivně podílí na regulaci vestibulovegetativních reakcí jako faktor, který omezuje a normalizuje vegetativní projevy během kinetózy. Slabá kortikální inhibice autonomních center způsobuje zvýšenou citlivost na kinetózy. Při aktivních pohybech vestibulární aparát reaguje adekvátními reakcemi, založenými na koordinaci jeho funkcí s funkcemi jiných aferentních systémů těla, včetně autonomního nervového systému. Při pasivním pohybu (jízda autem, plavba na lodi) dochází k dysbalanci mezi pasivní aktivací vestibulárního aparátu a funkční inhibicí motorického systému.
Vestibulookulomotorické reakce spočívají v optokinetickém nystagmu anebo vestibulookulárním reflexu (viz Kapitola EOG).
Hodnocení stability těla
Pro posouzení stability těla se používá metoda dynamické posturografie – stabilometrie. Při studiu udržování tělesné rovnováhy ve svislé poloze na stabilometrické platformě jsou data zaznamenána ve dvou rovinách: frontální (vlevo, vpravo) a sagitální (dopředu, dozadu). Stabilita těla v těchto směrech závisí na stavu tonu svalů, které jsou v těchto směrech aktivní a na senzorických, vizuálních a motosenzorických systémech (proprio- a taktilní receptory). Řízení vertikální polohy je nejsložitější v sagitální rovině, protože v této rovině je největší amplituda výchylek těžiště těla.
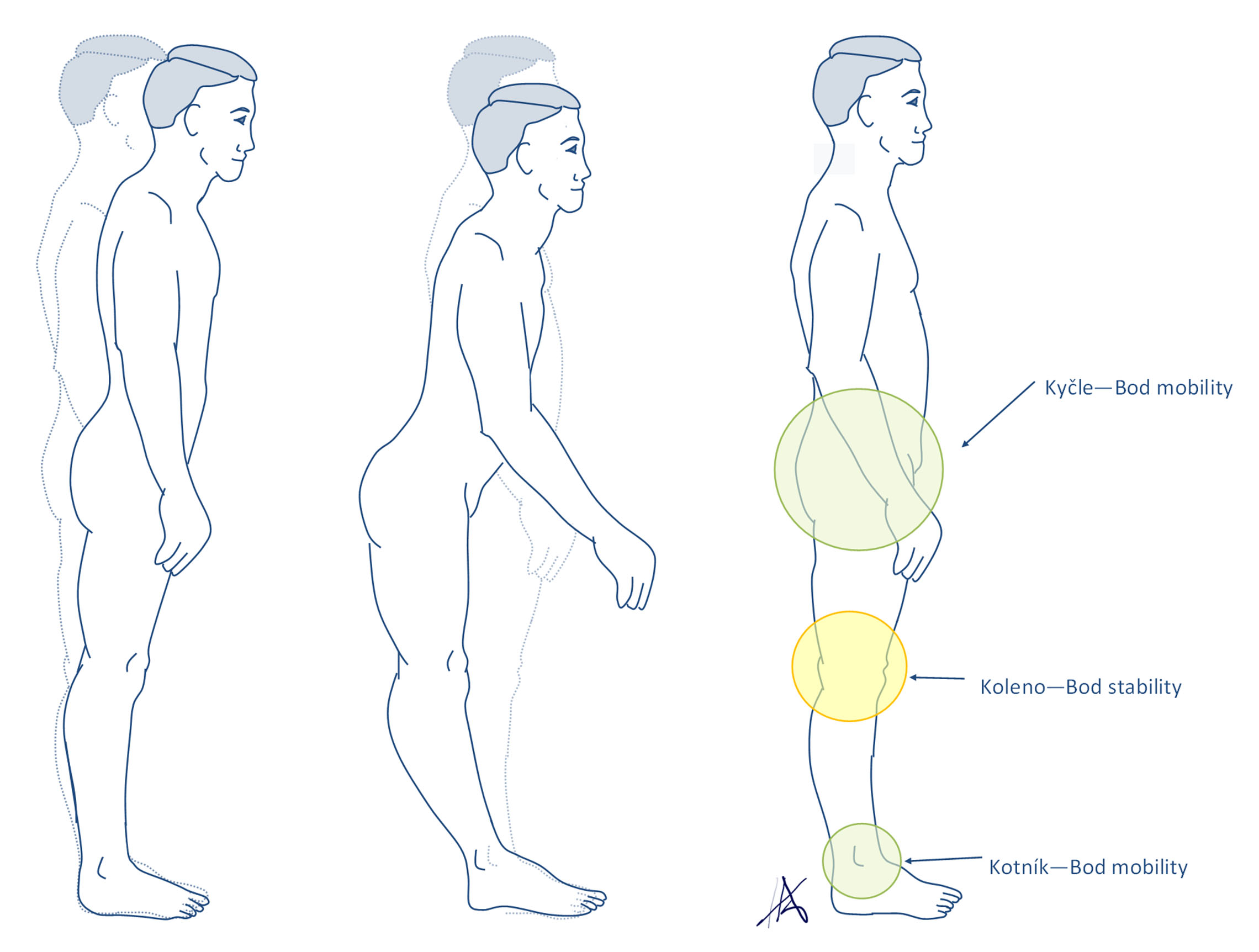
Komentář: Zatímco kotník a kyčle jsou zodpovědné za mobilitu těla, koleno je bodem stability. To znamená, že ovlivňování těžiště těla je prováděno skrze klouby mobility, klouby stability mají za úlohu udržet stálou polohu.
V sagitální rovině je popsáno několik modelů udržování rovnováhy těla s převažováním modelu jedno řetězcového/ jednočlánkového obráceného kyvadla (Obrázek 31-7). Takový model je velmi nestabilní a používá se k popisu posturálních odchylek při udržení statické pózy. Při minimálních odchylkách člověk používá strategii „kotníku“ (změnou úhlu v kotníku), při velkých a častých odchylkách se používá „kyčelní“ strategie, při které je stabilita dosažena díky kyčelním kloubům. Tento model jednočlánkového obráceného kyvadla má svá omezení, což vedlo k vývoji složitějšího modelu s ohledem na pohyb ve třech kloubech – v kotníku, v koleni a kyčlích.
Stabilometr
Stabilometr snímá momenty oporných sil stojícího člověka ve dvou na sebe kolmých směrech horizontální roviny. Jedná se o mechanicko-elektrický převodník s automatickým vyrovnáváním vlivu hmotnosti subjektu na stabilometrické signály. Funkční rozsah stabilometru je 20–120 kg hmotnosti subjektu. Snímaný signál zaznamenáváme v čase jako výchylku polohy centra oporných sil (COP) od středu stabilometru v předozadním a bočním směru (stabilogram) nebo jako umístění COP v souřadných osách horizontální roviny (statokinesigram). Průsečík os leží ve středu stabilometru, pozitivní hodnota na ose X představuje výchylku doprava, na ose Y výchylku dopředu.
Stabilometrický test je charakterizován několika parametry:
- Mean COP X,Y (mm) – průměrná hodnota souřadnic x a průměrná hodnota souřadnic y ze všech bodů křivky statokinesigramu. Závisí na pozici vyšetřované osoby vůči středu stabilometru a na míře a směru naklonění těla.
- Mean distance from the centre (mm) – průměrná vzdálenost COP v pravolevém (x osa) a předozadním (y osa) směru od mean COP X,Y. Je přímo úměrně závislá na ploše, již zaujímá trajektorie vykonaného pohybu COP.
- Mean velocity (mm/s) – průměrná rychlost pohybu COP. Charakterizuje úroveň svalového úsilí vynaloženého na udržení vzpřímeného postoje.
- X, Y-axis movement (mm) – dráha, kterou absolvovalo COP v pravolevém (X) a předozadním (Y) směru. Informuje o převládajícím směru pohybu COP a je přímo úměrná délce trajektorie pohybu.
Všechny uvedené parametry (kromě Mean COP X, Y) popisují celkovou stabilitu postoje. Zvýšené hodnoty znamenají snížení stability.
Kontrolní otázky
Testy vzpřímeného postoje (stability těla) byly navrženy podle:
| Ramba. | |
| Romberga. | |
| Richtera. | |
| Starlinga. |
Centrální nervový systém nevyhodnocuje polohu těla na základě informací:
| ze zraku. | |
| z vestibulárního systému. | |
| z proprioreceptorů. | |
| z páteřních gonioreceptorů. |